MASTER ASSIGNMENT
(40-45 EC MSc assignment)
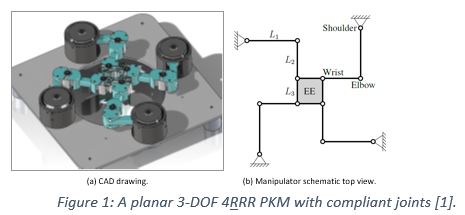
Two previous MSc graduation projects have addressed the modelling, design and implementation of a 3-DOF manipulator with flexure joints and redundant actuation, see Figure 1. In this system the end-effector “EE” can move in 3 degrees of freedom, being translations in two directions and in-plane rotation. The actuation is redundant as 4 motors are installed at the “shoulders”. The links are connected to each other, the end-effector and the fixed world with flexure joints. In this way the system combines advantages from both concepts, i.e. redundancy and flexure joints.
The current design allows only a rather small range of EE motion. Hence the goal of this assignment is to design, build, test and control version 3.0 of this manipulator which should offer a significant increase in workspace while avoiding a reduction of the parasitic natural frequencies. It is expected that this can be accomplished with more advanced flexure joints, resulting in more complex (flexible multi-body) models. Designing the next version of this manipulator with such models imposes some modelling and optimisation challenges.
The following tasks are foreseen:
- Compile a list of specifications and requirements, e.g. to define the 3-DOF range of motion.
- Set up a dynamic model for the manipulator with flexure joints using the UT modelling tools with the SPACAR software package. Consider a “smart” modelling strategy to benefit from the manipulator’s symmetry.
- Optimise the design, e.g. in terms of maximising the parasitic natural frequencies throughout the specified range of motion.
- Build the manipulator and verify its dynamical properties.
- Control the end-effector’s motion of the redundantly actuated system.
Contact person
