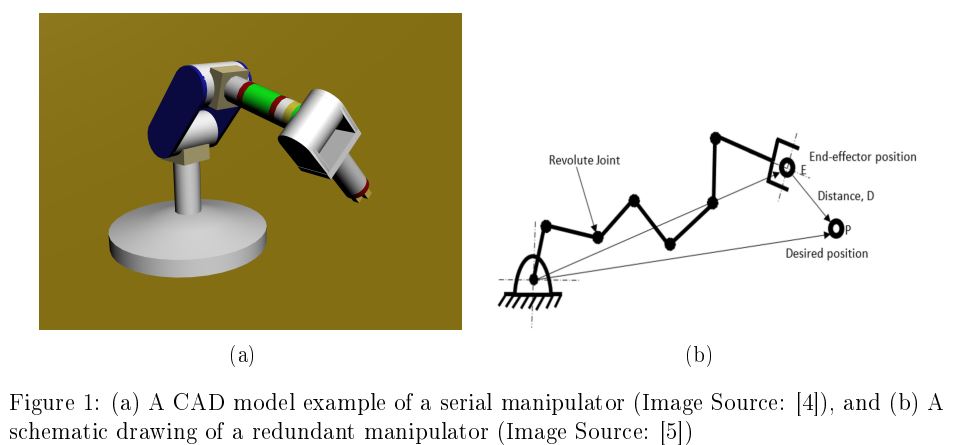
The vast majority of industrial robots in use today have a Serial Redundant Manipulator design. Serial Manipulators are the class of industrial robot manipulators that do not have any closed-kinematic loops and are composed of several serially connected rigid-body linkages, starting from a single base and ending at an end-effector (See Fig. 1(a)). Redundant Manipulators are the type of manipulators that have a greater number of configuration (joint)-space coordinates than the end-effector position and orientation configuration in operation (cartesian) - space (See Fig. 1(b)). In other words, in redundant manipulators, the end-effector position and orientation do not map to a unique configuration-space solution. Hence, any inverse-kinematics scheme for applying configuration-space control to a redundant manipulator often requires a choice from a set of feasible solutions. A standard approach for choosing an appropriate solution is to pick the solution closest to the current configuration of the robot. While inverse-kinematics-based configuration-space control is reasonably well-established and is widely used, there remain several issues with inverse-kinematics schemes, such as numerical instability, joint-limit violations, etc. An alternative approach for controlling robot manipulators, known as Operation-Space Control [1,2,3] eliminates the need for inverse-kinematics by directly computing the actuator-space torques/forces from the end-effector error signals in operation-space. Nevertheless, in order to use the operation-space control method for redundant manipulators, one needs to address some issues related to the assignment of null-space velocities (See [1]).
The goal of this project is to develop an operation-space control method for serial redundant manipulators. Additionally, potential-field-based control method for the serial redundant manipulator will also be investigated.
The thesis will include:
- Literature Review
- Deriving the equations of motion of a serial redundant manipulator and implementing a multibody dynamic simulation in MATLAB.
- Develop and implement an operation-space control method.
- Possibly, investigate and implement a potential field-based control for serial redundant manipulator.
- Compare multiple control methods (including configuration-space control) and prepare a report.
References
[1] Khatib O., 1987 A unied approach for motion and force control of robot manipulators: The operational space formulation IEEE Journal on Robotics and Automation 4353.
[2] Nakanishi J., Cory R., Mistry M., Peters J., and Schaal S., 2008 Operational space control: A theoretical and empirical comparison The International Journal of Robotics Research 737757.
[3] Harmeyer S., and Bowling A., 2004 Dynamic performance as a criterion for redundant manipulator control 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(IEEE Cat. No. 04CH37566) 36013606.
[4] https://commons.wikimedia.org/wiki/File:Robot_arm_model_1.png
[5] Chembuly V.V.M.J., and Voruganti H.K., 2020 An ecient approach for inverse kinematics and redundancy resolution of spatial redundant robots for cluttered environment SN Applied Sciences 120.