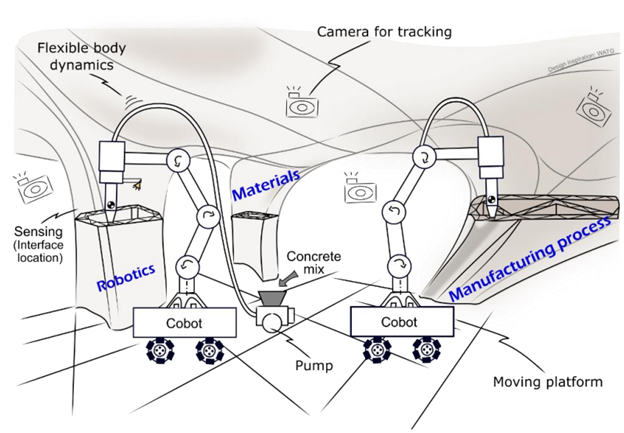
in this project an interface between the collaborative robotics and material manufacturing is explored. The main goal of the project is to make physics-based and data supported computational phantom of the manufacturing setup. The project explores the solid-fluid interaction as well as robot path planning with the goal of improving the quality of the manufactured material, and its mechanical perofmance.
People involved



